
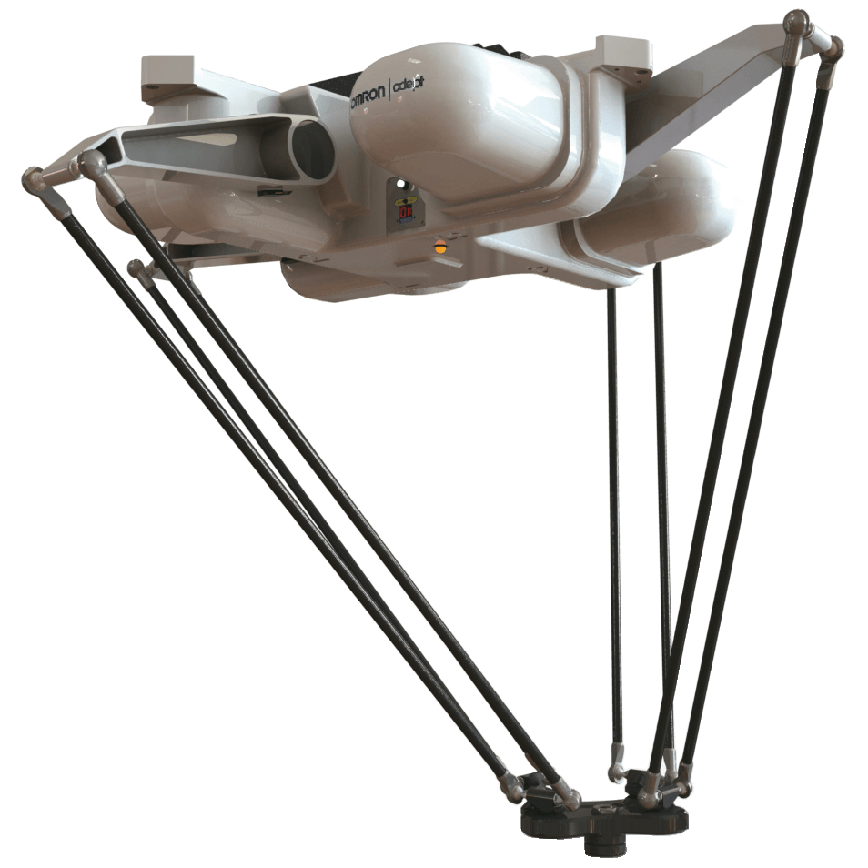
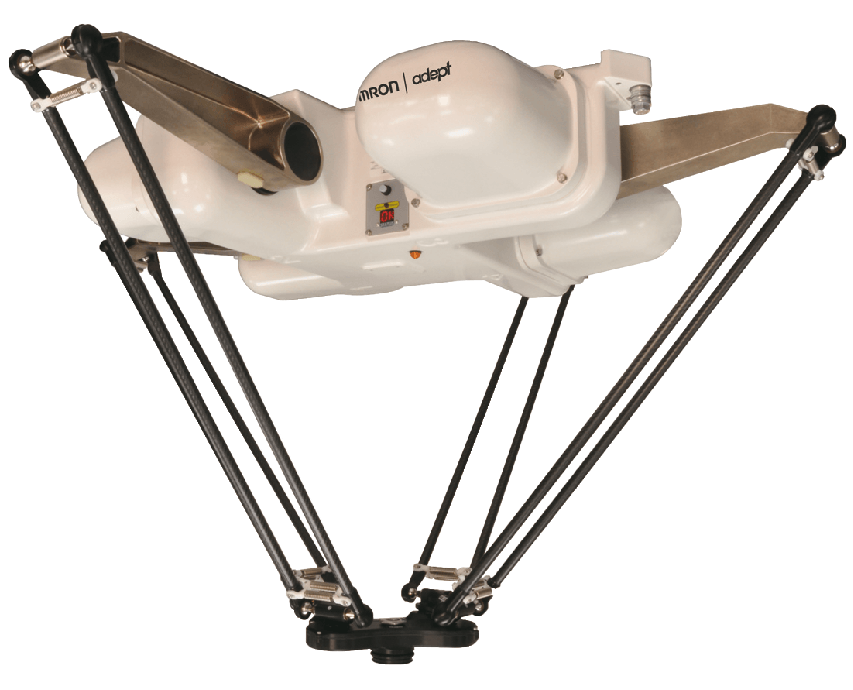
Quattro
Four-axis parallel robot achieves high speed and high precision
- Ethernet capability to control the robot through the familiar programming language (IEC 61131-3) of NX/NJ machine controller
- Four-axis arm evenly distributes the load on the robot
- Fast and high-precision conveyance and assembly
- Designed with a high payload to support multi-hand (multi-picking)
- 650HS model is USDA accepted for primary food handling
- 1,300 and 1,600 working range models
- Up to 15 kg max. payload
- IP65 protection class (IP66 for HS model)
Specifications & ordering info
| Produkt | Payload | Reach | Robot controller | Z-Stroke | Degree of protection (IP) | Rotation -/+ | Platform type | Description | |
|---|---|---|---|---|---|---|---|---|---|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Quattro 650H, Add-On, 15 kg payload, 1300mm diameter reach, P30, 0º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P31, 46.25º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P32, 92.5º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P34, 185º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
8 kg | 650 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Quattro 650HS, Add-On, 8 kg payload, 1300mm diameter reach, P30, 0º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Quattro 650HS, Add-On, 3 kg payload, 1300mm diameter reach, P31, 46.25º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Quattro 650HS, Add-On, 3 kg payload, 1300mm diameter reach, P32, 92.5º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Quattro 650HS, Add-On, 3 kg payload, 1300mm diameter reach, P34, 185º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP65 | 0 ° | P30 | Quattro 650H, Add-On, 15 kg payload, 1300mm diameter reach, P30, 0º rotation, 4 axis, 500mm Zaxis, IP65 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 46.25 ° | P31 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P31, 46.25º rotation, 4 axis, 500mm Zaxis, IP65 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 92.5 ° | P32 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P32, 92.5º rotation, 4 axis, 500mm Zaxis, IP65 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 185 ° | P34 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P34, 185º rotation, 4 axis, 500mm Zaxis, IP65 Base, IP67 Tooling, ePLC |
|
|
|
10 kg | 800 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Quattro 800H, Add-On, 10 kg payload, 1600mm diameter reach, P30, 0º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Quattro 800H, Add-On, 4 kg payload, 1600mm diameter reach, P31, 46.25º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Quattro 800H, Add-On, 4 kg payload, 1600mm diameter reach, P32, 92.5º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Quattro 800H, Add-On, 4 kg payload, 1600mm diameter reach, P34, 185º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
7 kg | 800 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Quattro 800HS, Add-On, 7 kg payload, 1600mm diameter reach, P30, 0º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Quattro 800HS, Add-On, 1 kg payload, 1600mm diameter reach, P31, 46.25º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Quattro 800HS, Add-On, 1 kg payload, 1600mm diameter reach, P32, 92.5º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Quattro 800HS, Add-On, 1 kg payload, 1600mm diameter reach, P34, 185º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
Accessories
Ordering information
| Apperance | Type | Name/Specifications | Order code |
|---|---|---|---|
 |
Robot Integrated Controller | 16 motion axis, up to 8 robots control | NJ501-R300 |
| 32 motion axis, up to 8 robots control | NJ501-R400 | ||
| 64 motion axis, up to 8 robots control | NJ501-R500 | ||
 |
Robot Controller | SmartController EX | 19200-000 |
| SmartController EX + Front Panel | 19300-000 | ||
 |
Pendant | T20 Pendant with 10 m Cable | 10046-010 |
| T20 Pendant-Jumper Plug | 10048-000 | ||
| T20 Pendant Wall Bracket | 10079-000 | ||
| T20 Adapter Cable, 3 m | 10051-003 | ||
 |
Vision Controller | IPC Application Controller | AC1-152000 |
 |
Camera | GigE PoE, 1602 x 1202 pixels, 60 fps, Monochrome, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-250 |
| GigE PoE, 1602 x 1202 pixels, 60 fps, Color, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-251 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Monochrome, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-300 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Color, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-301 | ||
| Belt Encoder (Conveyor-Tracking) |
Encoder Kit IP65 | 09742-001 | |
| Y-Adapter Cable, 3 m | 09443-000 | ||
| Encoder Extension Cable, 5 m | 09446-050 | ||
| SCEX-BELT,Y-Adapter Cable, 0.5 m | 09550-000 | ||
| XBELTIO Cable, 0.6 m | 13463-000 | ||
| Additional I/O Options | IO Blox (connect to robot), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30200 | |
| IO Block (connect to previous IO Blox), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30100 | ||
| IO Blox-to-robot Cable, 3 m | 04677-030 | ||
| IO Blox-to-IO Blox Cable, 3 m | 04679-030 | ||
| IO Blox-to-IO Blox Cable, 0.3 m | 04679-003 | ||
| XIO Termination Block, 12 inputs/8 outputs, cables included (1.8 m) | 90356-40100 | ||
| XDIO Termination Block, 50 pin, cables included (2 m) | 09747-000 | ||
 |
Front Panel | Front Panel with 3 m cable | 90356-10358 |
| Front Panel Cable, 3 m | 10356-10500 | ||
| Power Supply/Cable | AC Power Cable, 5 m | 04118-000 | |
| 24 VDC Power Cable, 5 m | 04120-000 | ||
| 24 VDC, 6.5 A, 150 W (Front Mounting), Power Supply | S8FS-G15024C
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 24 VDC, 6.5 A, 150 W (DIN-Rail Mounting), Power Supply | S8FS-G15024CD
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 1394 Cable, 4.5 m | 13632-045 | ||
| eAIB XSYSTEM Cable Assembly, 1.8 m | 13323-000 | ||
| DB9 Splitter, 0.3 m | 00411-000 | ||
| eAIB XSYS Cable, 4.5 m | 11585-000 | ||
| Ethernet Cable | XS6W-6LSZH8SS
2
Refer
to the Industrial Ethernet Cables Catalog (Cat.No.G019) for details. |
||
| Industrial Switching Hubs | W4S1-05C
2
Refer
to the Industrial Switching Hubs Catalog (Cat.No.V227) for details. |
||
| Solenoid Valve Kit | eCobra robots (600, 800, 800 Inverted) | 02853-000 | |
| Cable Seal Kit | Hornet 565 IP65/67, Quattro 650HS IP65/67, Quattro 800HS IP65/67 | 08765-000 | |
| Quattro 650HS Standard, Quattro 800HS Standard | 09564-000 | ||
| eCobra 800 IP65/67 | 04813-000 | ||
| eCobra 800 Inverted IP65 | 09073-000 | ||
 |
ACE License | Automation Control Environment (for ACE 4.x) | Please download it from following URL: http://www.adept.com/Robots-Tool |
| ACE PackXpert (for ACE 4.x) | 20409-000 | ||
| ACE Sight Vision Software (for ACE 4.x) | 20410-000 | ||
| ACE PackXpert with ACE Sight Vision (for ACE 4.x) This license contains an ACE PackXpert license and an ACE Sight license. |
20433-000 | ||
 |
Related Products | Machine Automation Controller NX/NY/NJ Series | NX/NY/NJ
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
| Automation Software Sysmac Studio | SYSMAC-SE2
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
||
| Collection of software functional componentsSysmac LibraryAdept Robot Control Library | SYSMAC-XR009
2
Refer
to the Sysmac Library Catalog (Cat.No.P106) for details. |
||
| Sysmac Studio 3D Simulation option | SYSMAC-SA4 |
||
Contact your Omron representative for lenses, lights, and licenses.
Sysmac Library
![]()
The Sysmac Library is a collection of software functional components that can be used in programs
for the NX/NY/NJ Machine Automation Controllers.Please download it from following URL and install to Sysmac Studio Automation Software.http://www.ia.omron.com/sysmac_library/The Adept Robot Control Library allows you to control Delta, Articulated and SCARA robots manufactured
by Omron Adept Technologies Inc. from the NX/NY/NJ Machine Automation Controller by using the same
instructions and programming methods.
Need assistance?
We’re here to help! Reach out, and our specialists will assist you in finding the best solution for your business.
Kontakt mig Quattro

Tak for indsendelsen af din forespørgsel. Vi vil vende tilbage med svar så hurtigt som muligt.
Vi har desværre tekniske problemer. Din formular er ikke modtaget. Vi undskylder og beder dig om at prøve igen senere. Detaljer: [details]
Tilbud på Quattro
Med denne formular kan du bestille et tilbud på et eller flere af vores produkter. Venligst udfyld alle de felter der er markeret med *. Dine personlige oplysninger vil blive håndteret fortroligt.
Tak for din forespørgsel. Vi vender tilbage med de ønskede oplysninger så hurtigt som muligt.
Vi har desværre tekniske problemer. Din formular er ikke modtaget. Vi undskylder og beder dig om at prøve igen senere. Detaljer: [details]
Delta Robot Series
Quattro 800H
- Rated working range: Ø 1,600 x 215 mm (Max. 500 mm)
- Max. payload range: 4 to 10 kg
- Number of axis: 4
- IP65 (with optional cable sealing kit)
Quattro 650H/HS
- Rated working range: Ø 1,300 x 215 mm (Max. 500 mm)
- Max. payload range: 3 to 15 kg
- Number of axis: 4
- IP65 (with optional cable sealing kit), IP66 HS model
- Quattro 650HS is USDA accepted for primary food handling
Control Units
Videos

-

Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.
01:21
Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.Relaterede produkter
-

Parallel robot ideal for use in the food and beverage, pharmaceutical and healthcare industries
-

Parallel robot ideal for use in the food and beverage, pharmaceutical, and healthcare industries
-

Four-axis parallel robot achieves high speed and high precision
Downloads







_getting_started_guide_en.jpg)


_users_manual_en.jpg)














